
 LockingBlock
LockingBlock


 The spring rod is guided by the 3d printed holder. This will be mounted at the back of the body once the final length has been determined.
The spring rod is guided by the 3d printed holder. This will be mounted at the back of the body once the final length has been determined.
 The locking block is also held within the body by the lever.
The locking block is also held within the body by the lever.

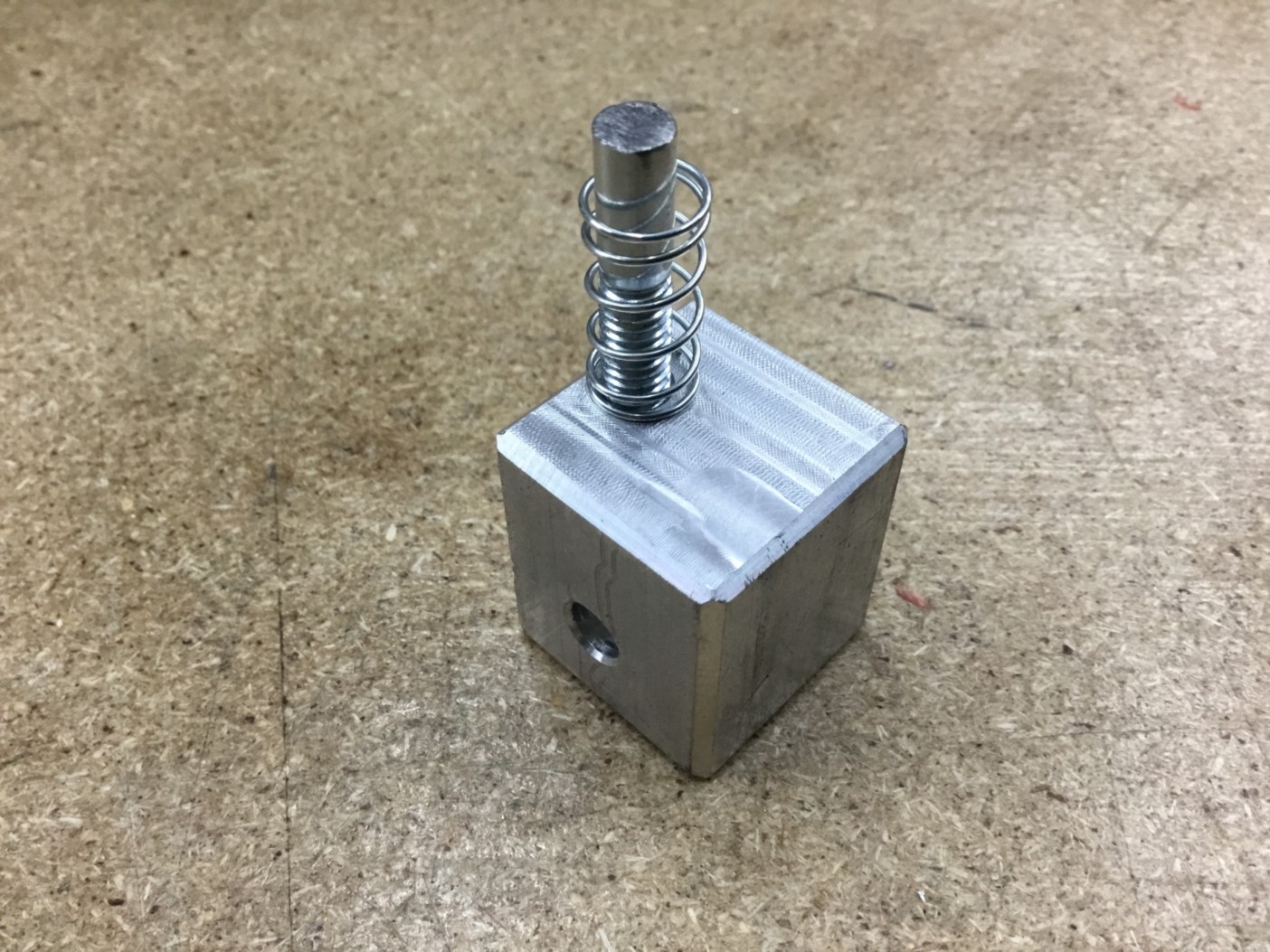
 Machining the smaller parts didn’t take too long – fixation block for the spring at the top of the rod, rotating pin for the elbowrest and blocking screw.
Machining the smaller parts didn’t take too long – fixation block for the spring at the top of the rod, rotating pin for the elbowrest and blocking screw.


 The biggest and most difficult part has been the height adjustment rod.
To avoid any mistakes I let FreeCAD create some technical drawings of my 3D parts.
The biggest and most difficult part has been the height adjustment rod.
To avoid any mistakes I let FreeCAD create some technical drawings of my 3D parts.
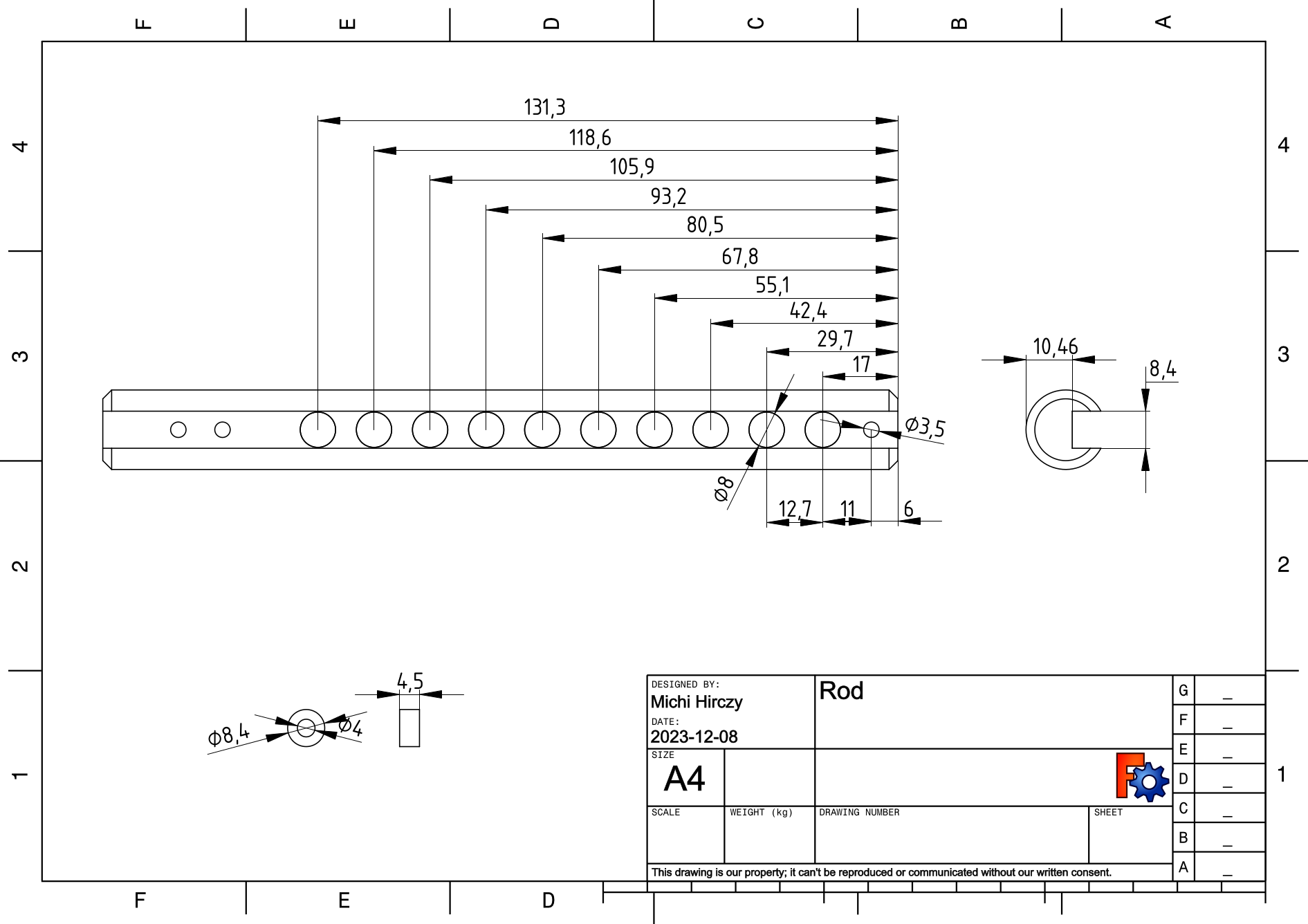 After the 20mm rod has been turned down to the correct diameter I started milling the 8,4mm slot, drilling the 8mm holes for the locking pin and the 3,3mm hole for the blocking screw (which prevents the rod from being pulled out mistakenly).
After the 20mm rod has been turned down to the correct diameter I started milling the 8,4mm slot, drilling the 8mm holes for the locking pin and the 3,3mm hole for the blocking screw (which prevents the rod from being pulled out mistakenly).


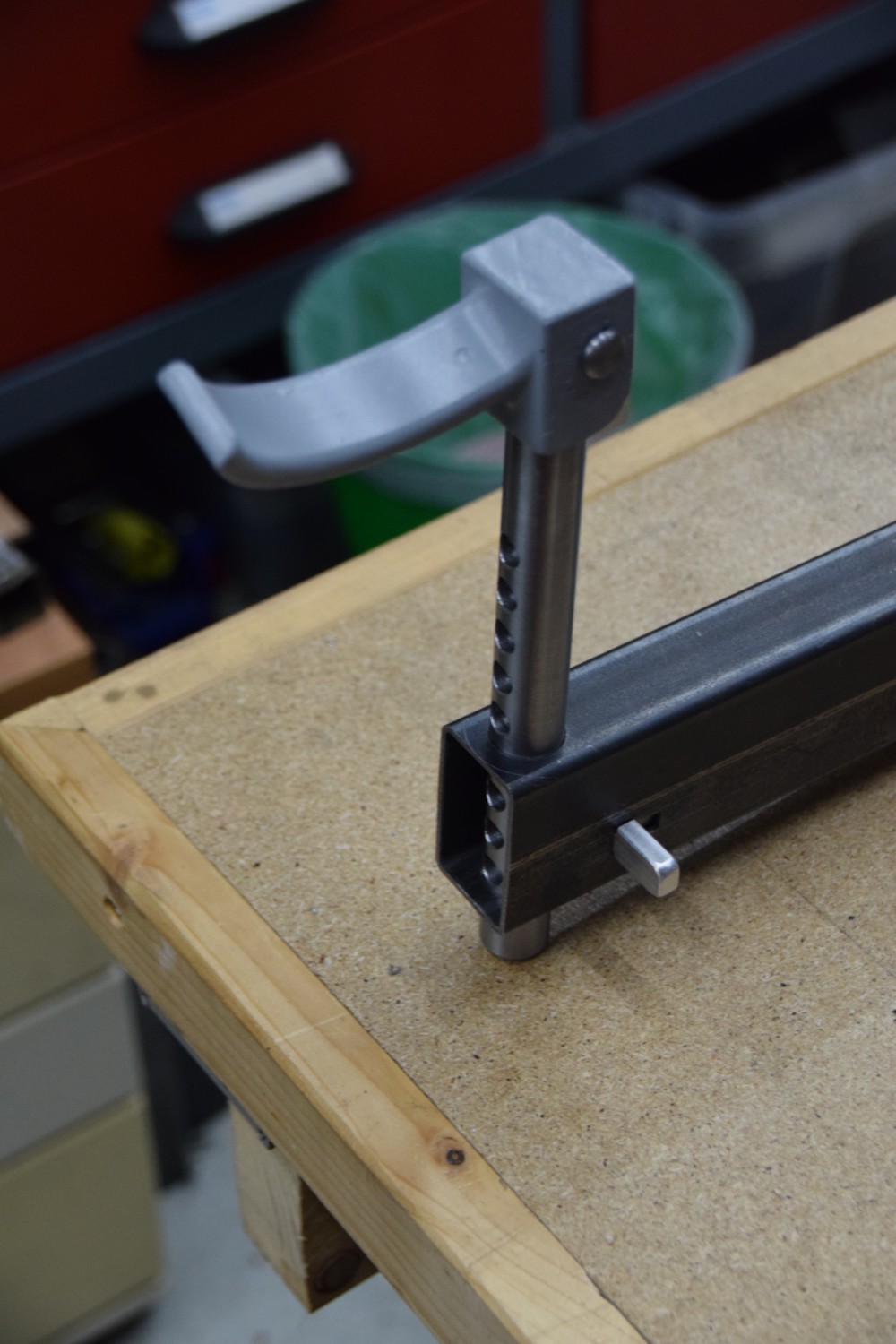
 To drill the hole for the rotating pin I had to think about a way to mount the rod perpendicular to the locking holes in the vise.
The clamping got a bit wild but in the end it was even stable enough for milling the flat at the top.
To drill the hole for the rotating pin I had to think about a way to mount the rod perpendicular to the locking holes in the vise.
The clamping got a bit wild but in the end it was even stable enough for milling the flat at the top.


 Just the 2 tapping holes for the spring fixation and the rod is done:
Just the 2 tapping holes for the spring fixation and the rod is done: 

 During all that metal work I needed a bit of change and I used some breaks to change the elbowrest from pink to “standard f-16 grey”.
During all that metal work I needed a bit of change and I used some breaks to change the elbowrest from pink to “standard f-16 grey”.

 Finally I mounted everything and except the fact that it looks like a duck it also resembles the original quite well.
Finally I mounted everything and except the fact that it looks like a duck it also resembles the original quite well.
 2 minor things are still missing.:
2 minor things are still missing.:
- the spring to hold the arm in the upper position needs to be drilled and bend
- the rotation pin needs a hole for the mounting wire
 Here’s a video showing all functionality like the original:
Here’s a video showing all functionality like the original: