
Now the cluster can really be called FINISHED 🙂
The second faceplate is done and the needles also got the round middlepart painted black 🙂

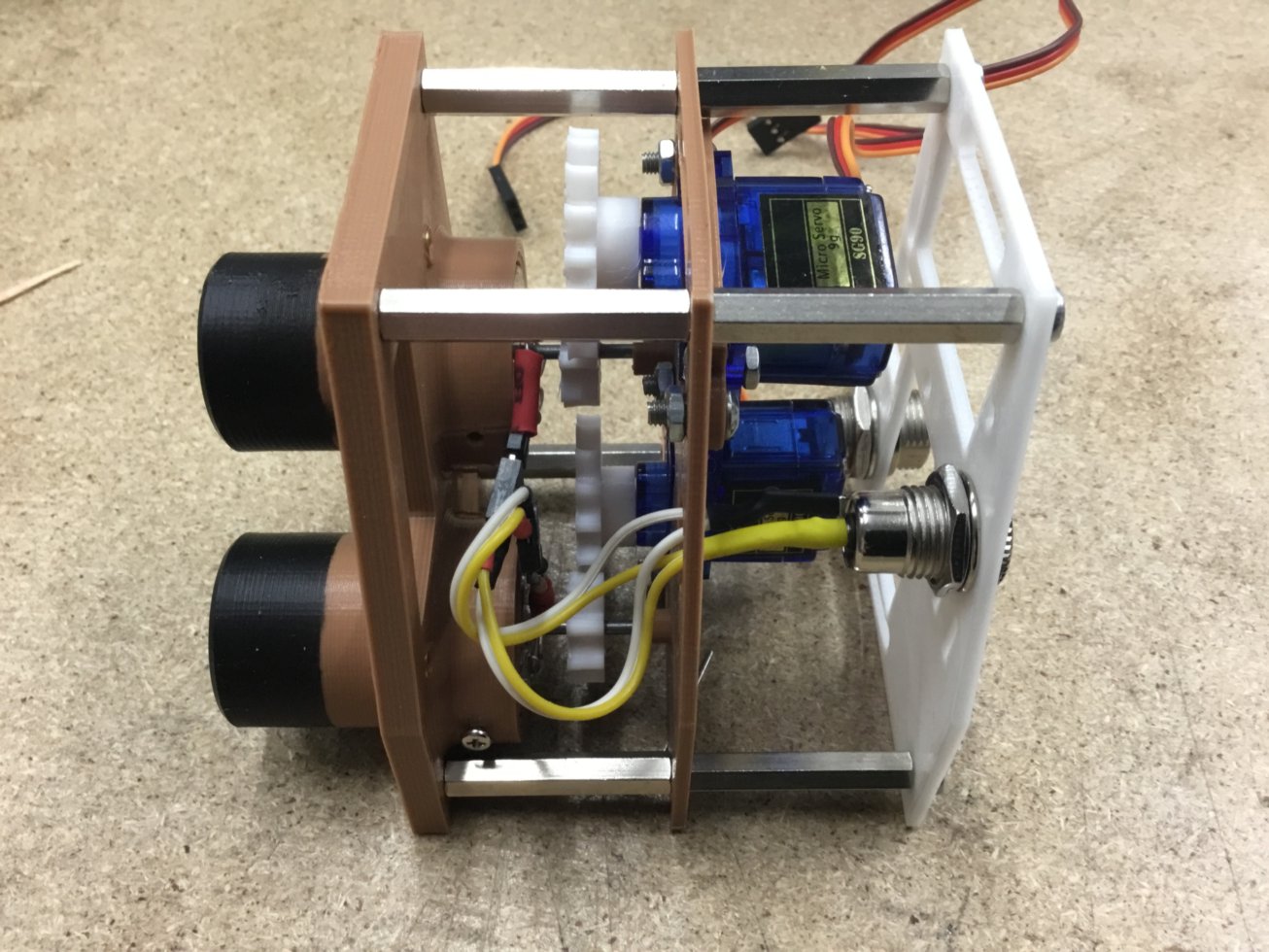
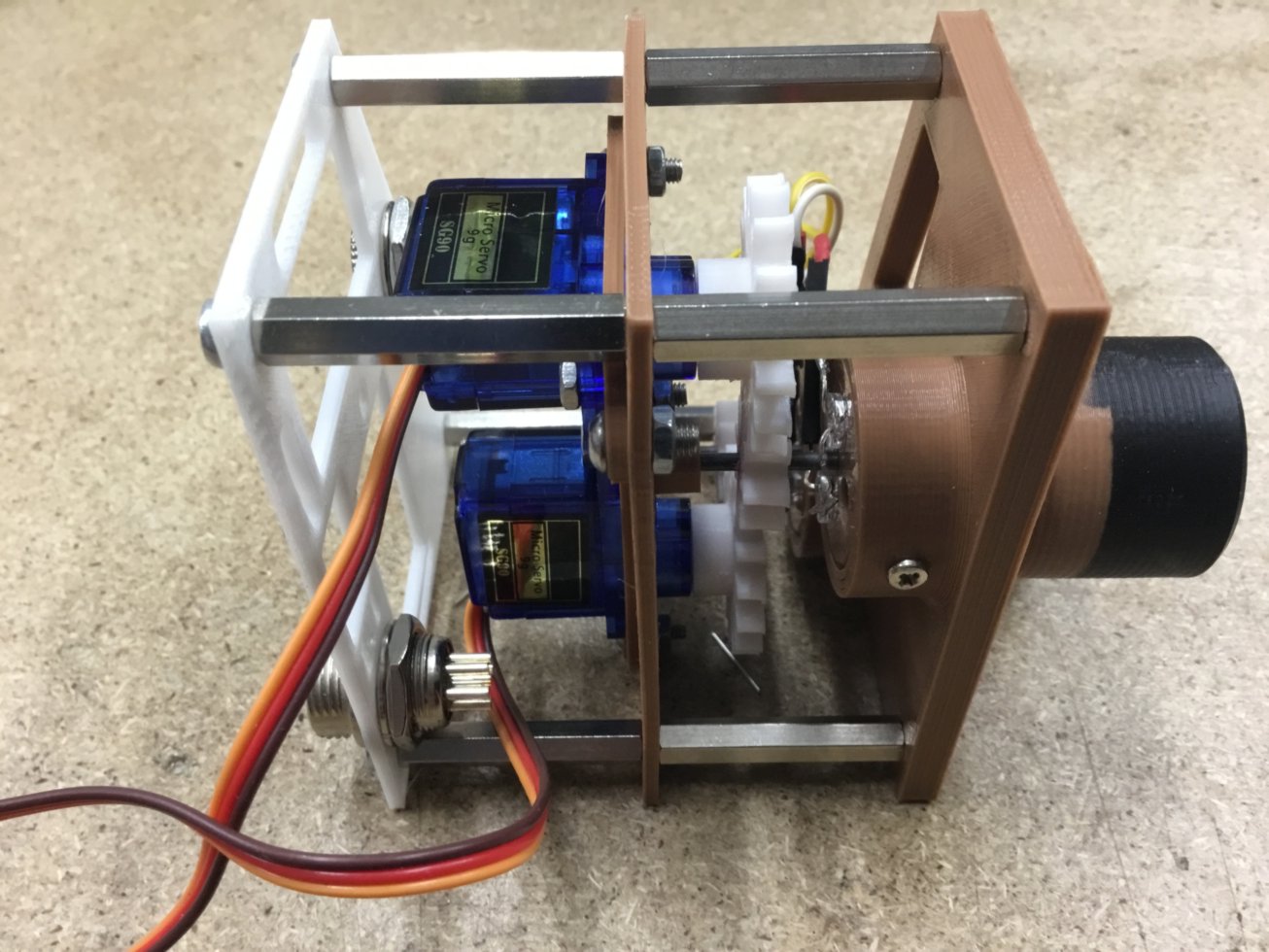
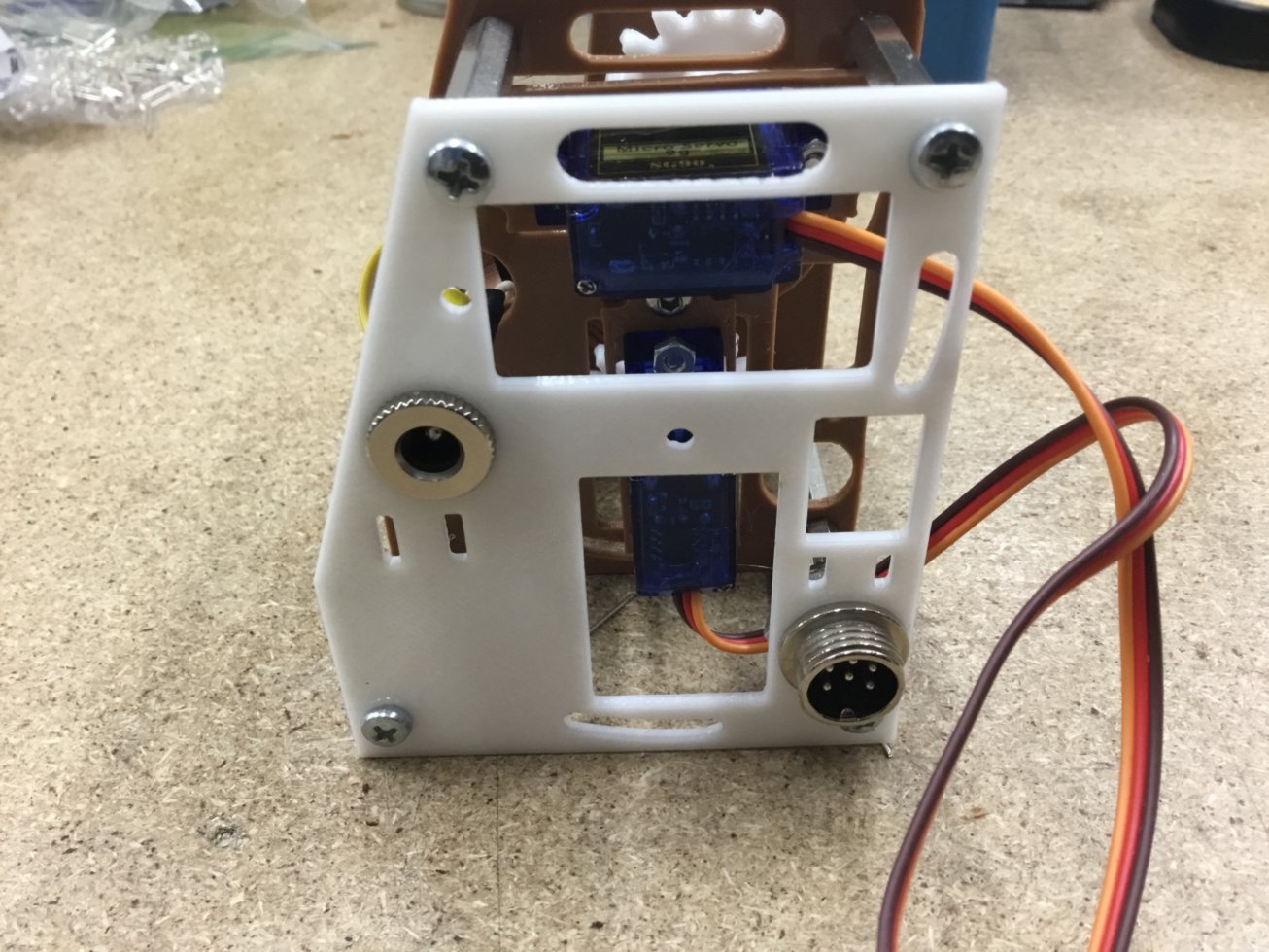
I’m still undecided, if I’m going to use the GX-12 connector for the servos or if they will be connected directly to the Arduino.
That mainly depends on where the Arduino will sit in the console later, but for now, I’ll keep the cables connected directly.
On it’s place it looks just as I intended it to.

And including the backlighting the movement of the needles is even much more beautiful 😉